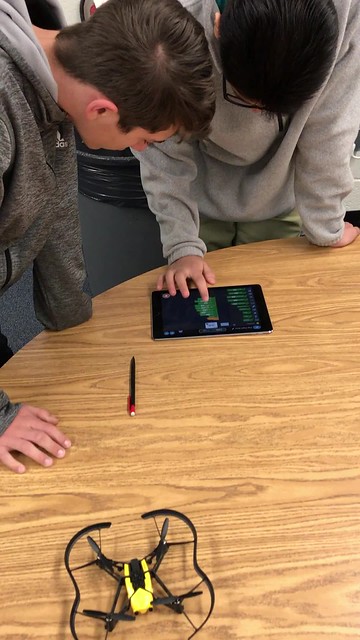
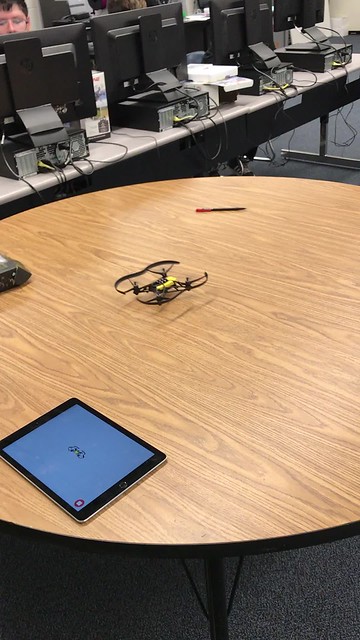
In case it helped others think about how to incorporate mini drones at their school I thought I’d share this design. Not presenting this as an ultimate solution, just as an example to build on. Please share links to designs you might have in the comments. As an aside I want to stress: I don’t train teachers that students should never fly drones via a joystick … but I am pretty frank that piloting via joystick is more just play – and that is not a bad thing – it has its place. Having students use apps like Tynker where they have to learn programing skills and problem solve to navigate their drone is really the point.
One awesome unintended consequence of receiving a grant is that sometimes there is “money leftover” – usually because of a cost savings or other circumstance. I just came into some “leftover” funds from 2 grants we have going. Some of that money I spent to get more Parrot Rolling Spider Minidrones. When I wrote the NSUAVCSI grant these drones were $99.99 each, the bid we negotiated got the price down to $62 (we bought 65 of them at once) and now the price is down to $49. Parrot has discontinued this model apparently, and the new models don’t have the wheels and are more than double the $$$ that I can get The Rolling Spiders for … so 62 new ones just arrived.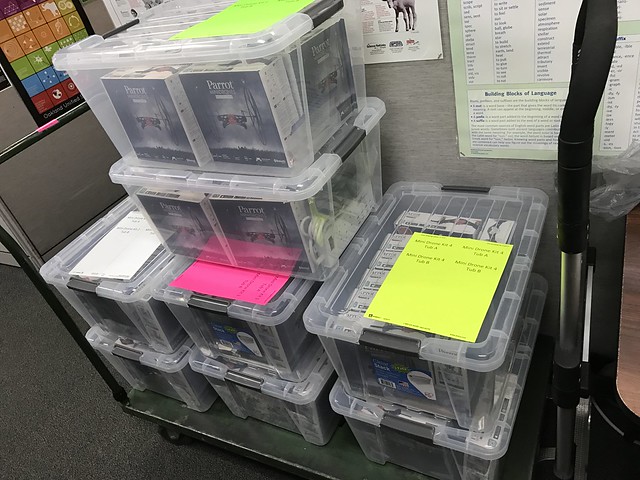
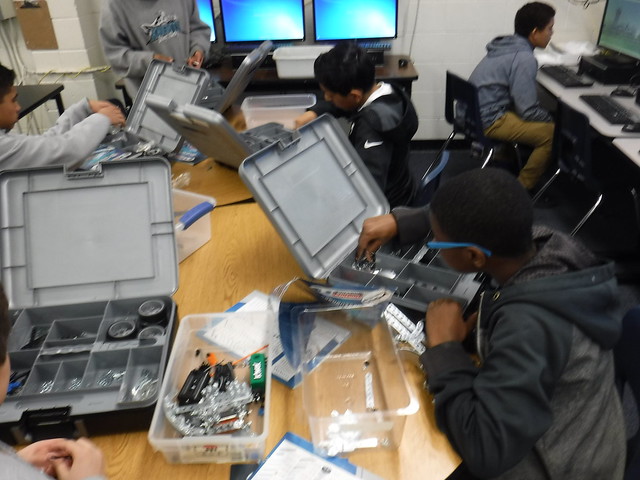
Now that I have some experience with checking out “kits” of drones for teachers to use in their classrooms, I re-designed the kits to make them easier for teachers and students to utilize.
The plastic tubs we have fit about 8 mini drones each, but since many class sizes here can be 30 students or more, each kit consists of 2 tubs (16 drones total) figuring 2 students per drone. BTW – 3 students per drone works too, but I like to provide as much flexibility as possible.
BTW – 3 students per drone works too, but I like to provide as much flexibility as possible.
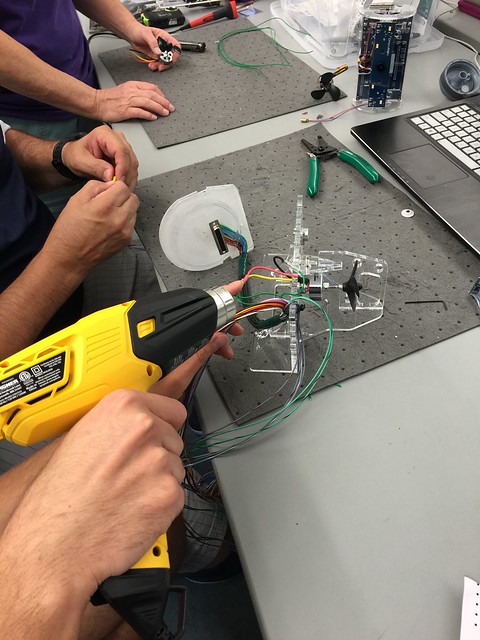
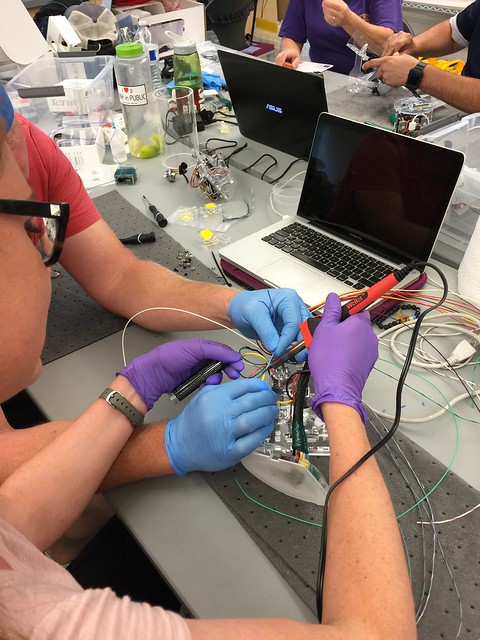
As with almost anything that runs on batteries, you can never have too many. So each kit has 4 battery chargers that each charge 4 batteries at a time – as well as 16 extra batteries. The USB cable that comes with each mini drone also fits the charger (which didn’t come with a cable). Removing batteries from the drones with just your fingers to recharge them in a charger is a bit of a struggle and tends to foster anxiety that something is going to break – so each kit also contains popsicle sticks that work well to gently pry the batteries from their confines.

A power strip with both regular 3-prong sockets and USB ports rounds out the kit for now. One thing that is missing are iPads to program and run the drones. I do have 20 on the way, but that is short of what is needed. A fair number of local schools have iPads, but they tend to be older, non-Bluetooth iPads that won’t work with the mini drones. 20 iPads was as far as I could squeeze the “leftover money”.
Hope that helps anyone looking into adding a programming component to your curriculum that also teaches students the care and feeding of aerial robots!
Learning is messy!

![DSCF0003[1]](https://c1.staticflickr.com/8/7469/29103462882_bca8f00f99_z.jpg)