
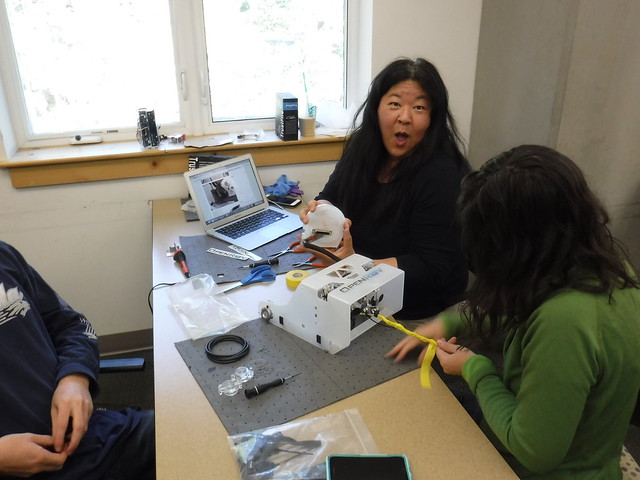
![DSCF0003[1]](https://c1.staticflickr.com/8/7469/29103462882_bca8f00f99_z.jpg) Sarah Richardson, a high school science teacher at Virginia City High School in Nevada, and also a participant in our NSUAVCSI program checked in with me while I happen to be writing my last post. Virginia City, Nevada is in the Storey County School District, a very rural school district that also happens to be home to the new Tesla Gigafactory and the largest data center in the world the Switch Supernap. And yes, it’s the same Virginia City made famous by the TV show Bonanza.
Sarah Richardson, a high school science teacher at Virginia City High School in Nevada, and also a participant in our NSUAVCSI program checked in with me while I happen to be writing my last post. Virginia City, Nevada is in the Storey County School District, a very rural school district that also happens to be home to the new Tesla Gigafactory and the largest data center in the world the Switch Supernap. And yes, it’s the same Virginia City made famous by the TV show Bonanza.
I delivered Parrot, Phantom 3 and OpenROV drones, 10 Chromebooks, and other materials the grant provided, to Sarah in mid January which was later than planned because of the historic rain and snow we’ve had. Sarah took it from there. Today she emailed me this update on what she and her students have been up to:
I am having the students (well I am trying to get the students) to make videos about what they have been doing. We have come up with a few road blocks with the drones that they have problem solved. We could not get the drones to pair with the controllers. I told them to figure out what to do, and they did it. I was excited that they actually did it! Once paired they played with the flight simulator. I am hoping that once the weather clears up, we will get them piloting outside!
After they get comfortable with the controls, they are figuring out how to code a course that will take a panoramic picture of the school. Our final project… hopefully, will be to create a topographical map of the school grounds. Then I have grand ideas of using that map to design a sustainable slope in the front of the school. As we have one side of the front of the school that is covered in rocks that flooded the walkway and the other side is full of weeds. I am hoping to have them design a sustainable slope or create a terrace garden of sorts with a native plant garden. That is my vision, but the second part might take a while to do.
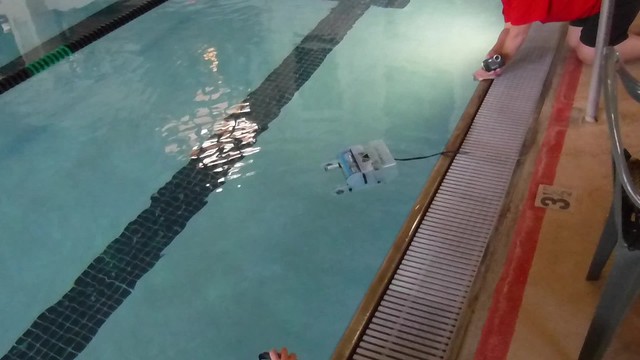
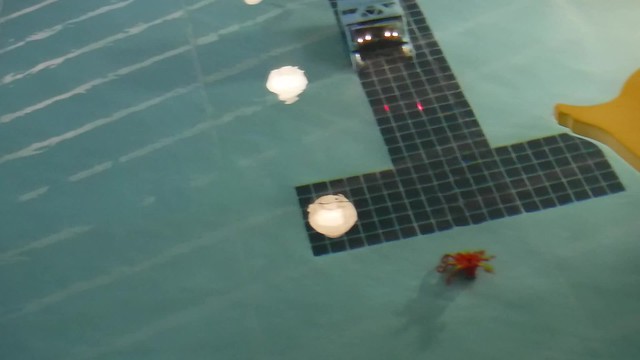
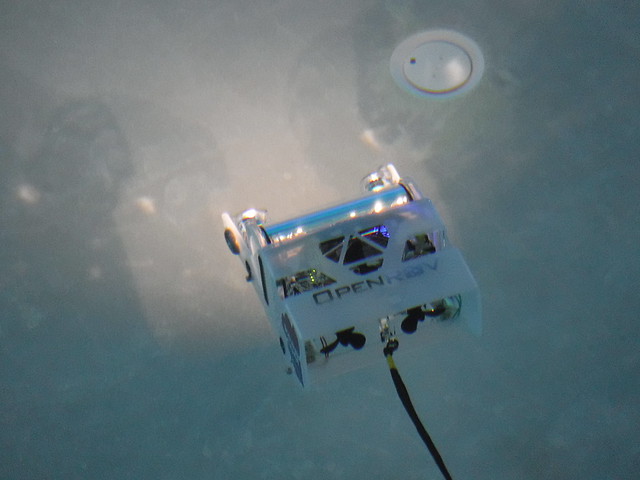
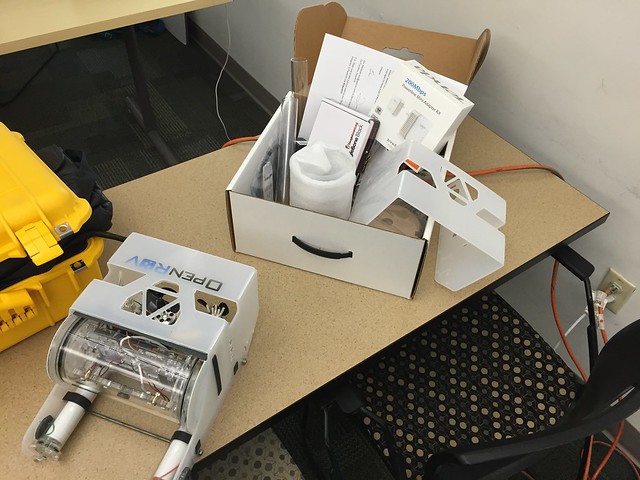
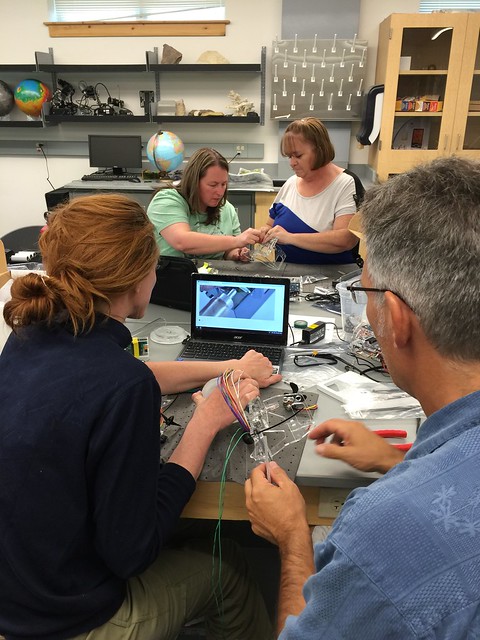
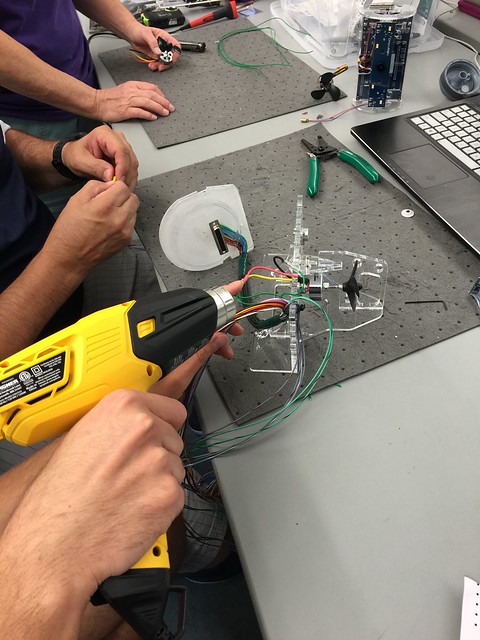
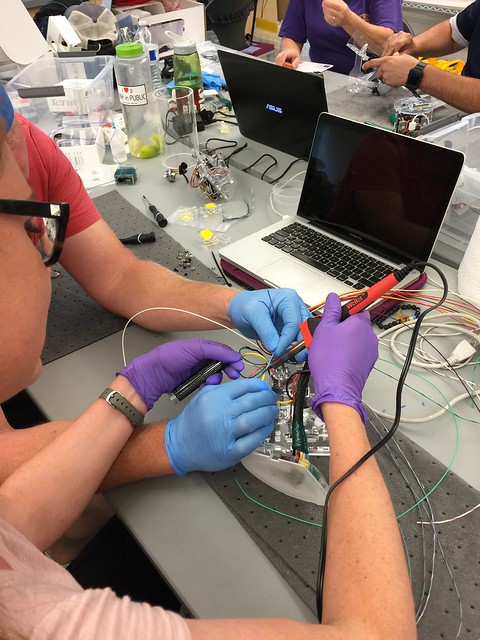
As far as the ROVs, (Editor’s note from Brian – she is referring to – OpenROV 2.8 Underwater robots) I have a small group still coming in and working on building their own. We just received the thruster packs from SeaPerch… it took about three weeks to get them from the time I ordered them. So, I think by next week we will have a few homemade ROVs. Then we will focus on building the controllers.
Can’t wait to hear what others in the program have been up to when we meet up for our first follow-up class.
Learning is messy!



















![DSCF0003[1]](https://c3.staticflickr.com/8/7469/29103462882_bca8f00f99_z.jpg)
![DSCF0023[1]](https://c2.staticflickr.com/9/8016/29132778921_9276484789_z.jpg)




