You can tell from the bulk of my most recent posts that a big part of my job right now is about facilitating our STEM institute. I actually have another post about telescopes waiting in the wings for after I get a couple of questions answered. This video was produced by the Washoe County School District to celebrate Mike Ismari’s STEM class at Dilworth Middle School STEM Academy. Mike signed up for our STEM institute right away last year because he had received a grant to buy several models of drones (you mostly see them in the video, but a few he checked out from the institute make an appearance as well). Mike wanted to learn about the ethics and safety of utilizing drones in the classroom as well as the pedagogy to consider. Our institute is still ongoing and will be pretty much right up to the end of the school year. I think you’ll enjoy the video … it’s does a great job of showcasing Mike and more importantly his students and the learning they are part of. Enjoy!!
Although classroom visits are not actually required by the Nevada STEM Underwater and Aerial Vehicle Computer Science Institute (NSUAVCSI)“College and Career Ready” grant I wrote last summer, I believe visits and mentoring are a vital pieces of quality professional development. I’ve done about 4 visits so far and plan to do many more. Back in December (Yes I’m late getting this posted – Urgh!) I visited Carrie Mieras’s class at Sparks Middle School. They were experiencing using the Parrot Spider Minidrones for the first time although they had used another type of drone that only allows controlling via a joystick controller, so this would be their first attempt at writing a program to fly.
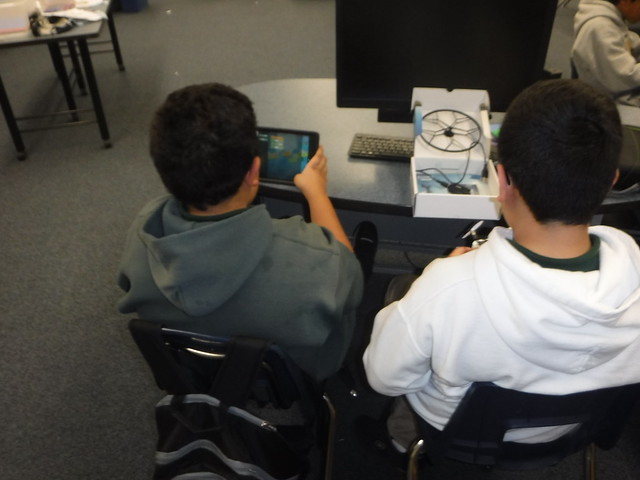
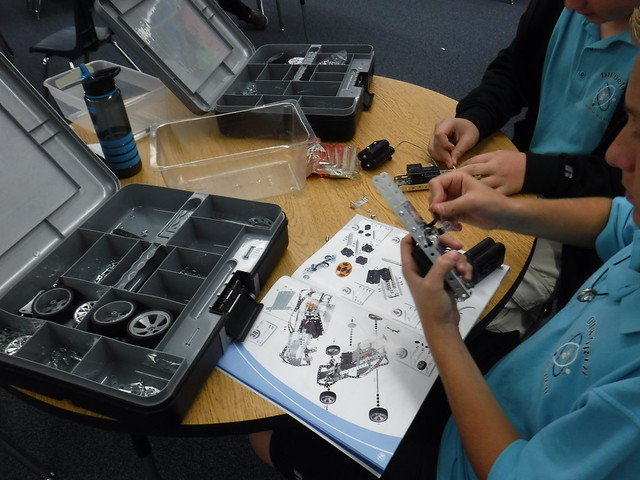
They worked in pairs and “3’s” to assemble the wheels that allow these drones to roll on the ground ceiling or walls, but also perform as blade guards. While one partner was assembling, the other was setting up either Tickle or Tynker on their iPads or iPhone to write their block program that would tell the drone what to do.
Block programming is a great first step to learn programming because it can be used successfully by even young children. Even though students are not writing actual lines of code, the process of block programming includes many of the thinking and problem solving skills required to program in languages like Python.
It was interesting to watch students struggle some to write their first program, but also to identify which of the 8 or 9 Parrots that showed up on their iPads was theirs. Several times students would choose the wrong one and when they started their program someone else’s Parrot would spring to life and begin it’s journey. That led to a quick lesson on how to tell which is which and then they were off!
You can see the block program on this student’s iPhone (he was using Tickle, (Tynker doesn’t work on iPhones) to tell his Parrot Spider Minidrone what to do.
By the time everyone had had a chance to get things off the ground a bit the period was over (“Whaaaaat!!??”) and it was time to put stuff away.
It was definitely a bit of a “messy” experience for the students, so I loved it. They weren’t taught everything … they had to figure things out on their own, but they were now ready to be more productive the next day!
Kevin and I both (like so many others) seethe at the slow pace of innovation and change in education. Below is the text from the EduCon 2.9 web site about the session. Come be a participant in the conversation:
Brian Crosby, Kevin Jarrett — Brian Crosby – Pre-K – 12 STEM Learning Facilitator, Nevada’s Northwest Regional Professional Development Program; Kevin Jarrett – STEAM teacher at Northfield Community Middle School
A discussion of the productive tensions facing innovators at all levels of leadership, formal to informal, classroom to central office, as they dare to advance new ideas and transform professional practices, often despite seemingly insurmountable organizational inertia and even hostile political environments. Kevin and Brian will use their personal experiences as the starting point for the group’s exploration of “typical” (and not-so-typical) challenges facing those who willingly disregard the status quo in pursuit of what’s best for kids.
The basic gist is this: great teachers want to innovate; how do they do so, and how far do they go, without potentially angering colleagues, administrators and clients and destroying their careers?
What does / could / should innovation look like?
How and can we make innovation happen?
Who needs permission?
How do we get this message to, “The leaders that will lead us to this?”
What examples do we have that this works?
How do we effectively promote innovative classrooms / schools / districts doing this already?
How do you grow seeds of innovation into more than isolated pockets of innovation, in a world where ‘accountability’ and data are more of a focus than ever before?
Since much of what this looks like defies easy measurement, what measures CAN we use?
Conversational Practice
This will be a conversation that embraces the adage that, “The smartest person in the room is the room itself.” Kevin and Brian will take on the role of facilitators, and while they will add to the conversation, their goal will be to incite the participants in the room to explore the productive tensions in the room. A private wiki will be used to gather thoughts and compile summary observations. In addition, we plan to use the ‘Sucks vs. Rocks’ methodology, described by Darren Kuropatwa here: http://adifference.blogspot.com/2014/10/assessment-rocks-and-sucks.html
My last 5 or 6 posts have focused on the Nevada STEM Underwater and Aerial Vehicle Computer Science Institute (NSUAVCSI) grant I wrote and am now facilitating. 18 middle and high school teachers started out learning a bit of computer programming, then the ethics, safety, educational uses and how-to’s of aerial vehicles, and now underwater vehicles.
Beyond teaching and facilitating the institute classes and activities I’ve begun doing visits to the participating teachers’ classrooms. I’ve waited until now so teachers had time to be trained and then begin utilizing the Parrot, Phantom 3 and OpenROV 2.8 robots with their students.
This week I visited Mike Ismari’s class at Dilworth STEM Academy Middle School. Besides science classes Mike teaches an elective called “Aviation and Drone Tech.” He has also received a grant of his own which will provide several models of aerial drones for his students to build and fly later. He’s still not sure when his will arrive so he signed up for the NSUAVCSI to not only get training in utilizing robots in student learning, but to have access to the Institute robots now.
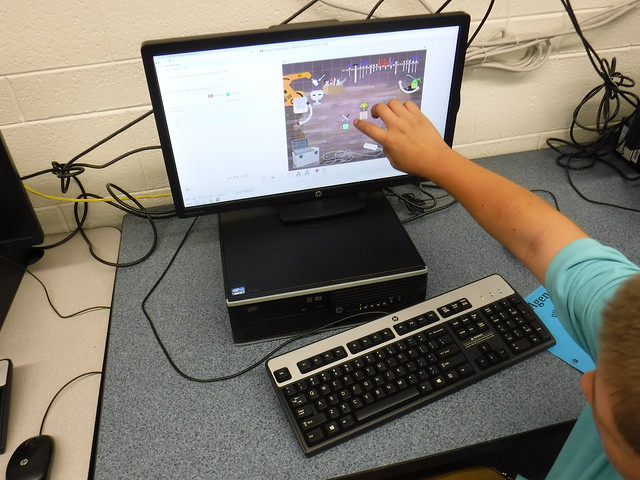
His students have already been programming 6 of the Parrot drones from the grant he checked out, but during my visit the class was involved in several other activities. Some students were finishing up a research project on drone safety and the laws governing drones.
One of the resources available are RF 7.5 flight simulators that allow you to virtually fly different models of drones. It really is a great way to learn to fly them by stick without the “messy” learning part that might include crashing and breaking expensive vehicles before flying a real one. One of Mike’s students was practicing his skills that day.
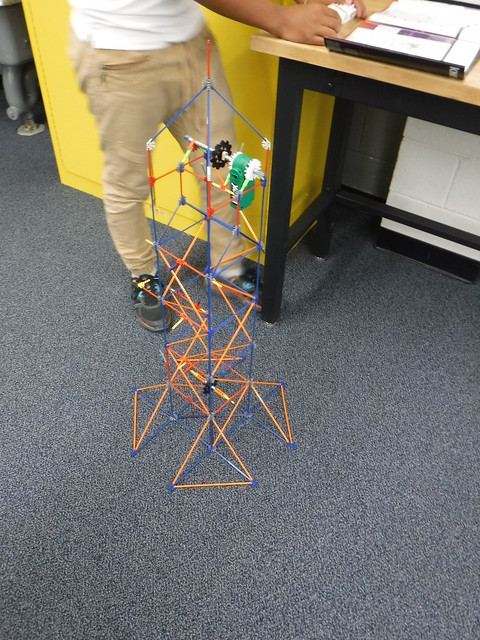
Still other students were busy building their own model aerial vehicles that cannot actually fly and other devices to learn “making” skills.
We recently received prop guards for the 19 Phantom 3 Professional quadcopters available for checkout, so Mike is planning on checking some out in the next few weeks. This news was just what his students wanted to hear.
Day four of building our OpenROV underwater robots was very eventful. The original thinking was that it would take 4 full days of our 5 scheduled classes to finish building our robots, and not until the 5th day would we be able to try them out. However the teams of 2 to 3 teachers proved the power of collaboration as it became apparent last week that they would be ready in less time. In fact we did take time from building to have lectures on different aspects of underwater robots and we even took a tour of the facilities at the Tahoe Science Center.
The past 2 days included finishing assembly, testing out controls, aligning and focusing the scaling lasers, calibrating the compass and a bit more. While engaged in those activities a local TV station showed up and produced this storyabout what we were up to.
Below: Aligning the scaling lasers by projecting them on 2 dots 10 centimeters apart on the wall.
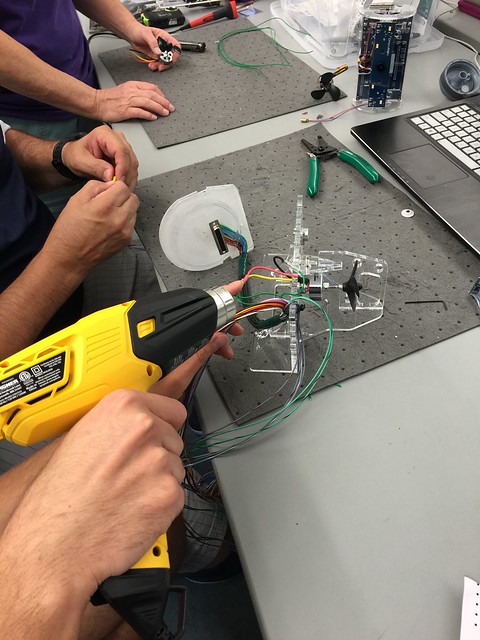
Right: Still wiring and soldering to finish up as well.
Above: The OpenROV’s starting to look like underwater robots.
Below: Touring the Tahoe Science Center facilities and learning about field trip possibilities.
The TV cameras were rolling:
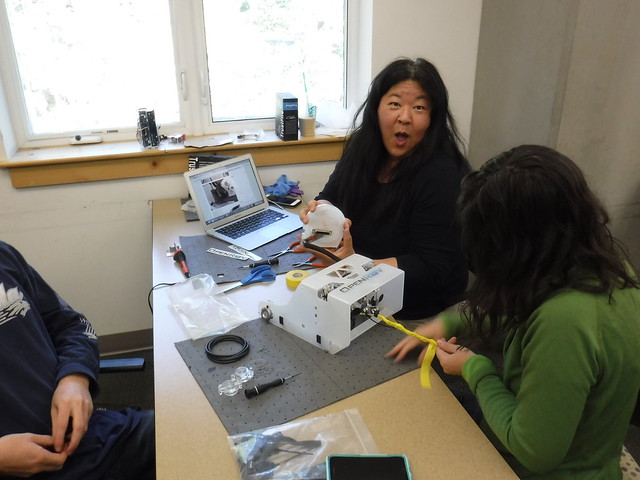
Saturday morning was the last push to be ready to swim our ROV’s. The local public pool had reserved time between 2:00 and 3:30 to use their pool as a test facility, so 1:30 was our deadline to pack-up and get to the pool. Every detail was checked. Connections to the Chromebook computers, camera operation, thruster operation, lights, lasers, all checked.
Below: The connection to the computer checks out. Once the connection is made the interface opens in a web browser of your choice.
Before we knew it we were off to the pool. The unheated water was cold, but even so one of the life guards volunteered to jump in and help us with a few early tests for water tightness. Once we had the first one cruising the pool she also swam into view so we could take underwater photos of her. We still haven’t downloaded this yet, but we might share them in the future.
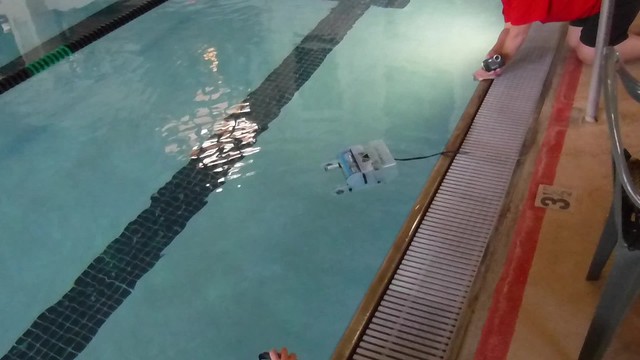
Below: First step is to place the ROV into the water and check for any bubbles. Bubbles mean LEAK! and immediate removal to find the source. All 6 of our ROV’s passed the leak test with flying colors.
Then it was time to swim:
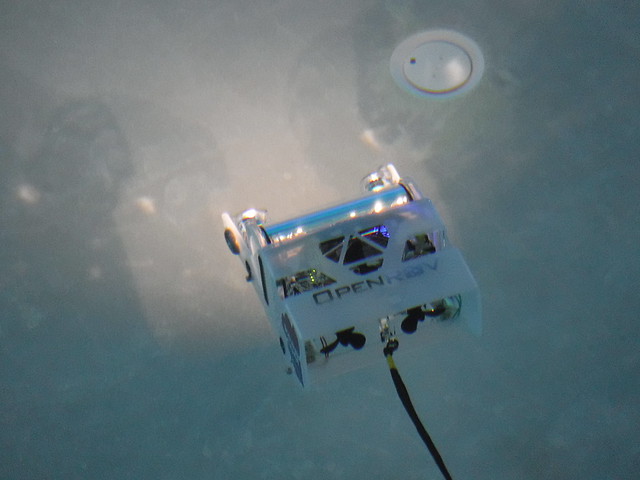
Below: Each teacher in the institute received a waterproof digital camera. Here the daughter of one of the teachers uses one to get underwater photos of Mom’s vehicle.
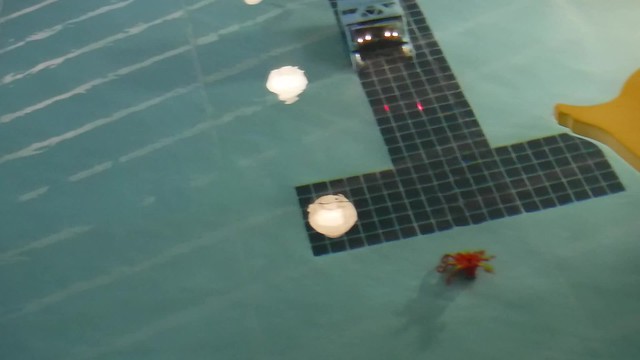
Below: Testing the scaling lasers and maneuvering towards a rubber crab on the bottom of the pool.
Below: Lights check out OK.
Needless to say the excitement was palatable. Visitors and people that work at the pool followed our progress and wanted to touch the devices. Next we plan to launch them in Lake Tahoe and swim them for a day. Then they can be checked out by teachers to use in their classrooms. Woo hoo! It was a great day.
One of the resources we shared with teachers in the Nevada STEM Underwater and Aerial Vehicle Computer Science Institute this past weekend was this video explaining how OpenROV got its start by David Lang. It’s a “TED Talk-like” video produced by National Geographic. I especially appreciate his references to “citizen science” projects.
From the description of the video on YouTube:
“Originally interested in building an underwater robot to explore a cave rumored to have gold and treasure, 2016 National Geographic explorer David Lang and a friend had no idea where their curiosity and drive for exploration would lead them. They turned to the Internet for help building their underwater robot, and a community of people emerged to assist. With the ability to descend to a maximum depth of a hundred meters, their low-cost underwater robot, called OpenROV, is redefining ocean exploration. Hear Lang talk about the journey to build OpenROV, how it is inspiring people to explore and engage in citizen science projects, and how the latest technology is creating a wave of low-cost, do-it-yourself products that are making new forms of exploration accessible to people all over the globe.”
The Nevada STEM Underwater and Aerial Vehicle Computer Science Institute (NSUAVCSI) was designed to provide professional development for 6th through 12th grade teachers in not only computer programming, aerial vehicles and underwater robots, but to more importantly then make those resources available to their students. My last several posts have been about our progress so far in the computer programming and aerial vehicle aspects. Now we have begun the underwater robot section of the institute.
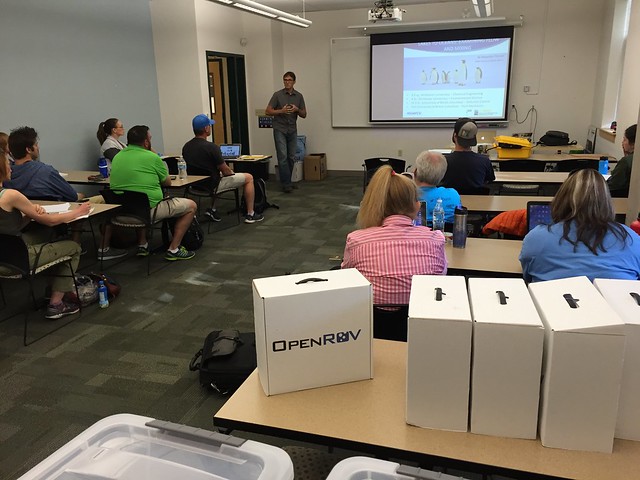
I chose to purchase 7 OpenROV 2.8 underwater robots partly because they would have to be assembled. Many teachers have limited “making skills,” and assembly of these vehicles requires soldering, wiring, acrylic welding, gluing with epoxy, super glue, other adhesives and more. Dr. Alex Forrest from the University of California, Davis, the lead instructor for this portion of the class, received one of the 2.8s weeks ago so he could assemble one to prepare to guide the teachers through the process. There are excellent directions online provided by OpenROV on how to build the robots, but having an experienced builder there able to share their “messy” mistakes and learning during the build has been invaluable to say the least.
Friday the 18 teachers in the institute met at the Tahoe Science Center home of the Tahoe Environmental Research Center(which is affiliated with UCD, hence Alex’s connection) to learn the science and engineering behind UAV’s, but also to begin assembling the 6 vehicles they’ll be able to check out for use with their students.
Above: Dr. Alex Forest begins class with a short presentation on the hows and whys of underwater vehicles.
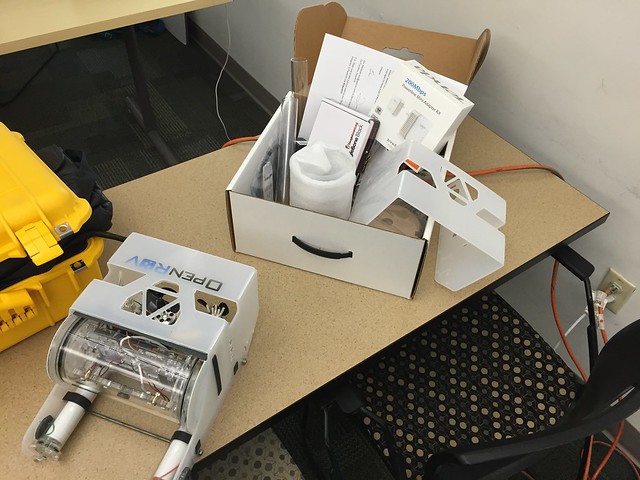
Below: The goal – an assembled OpenROV 2.8 next to an unassembled one.
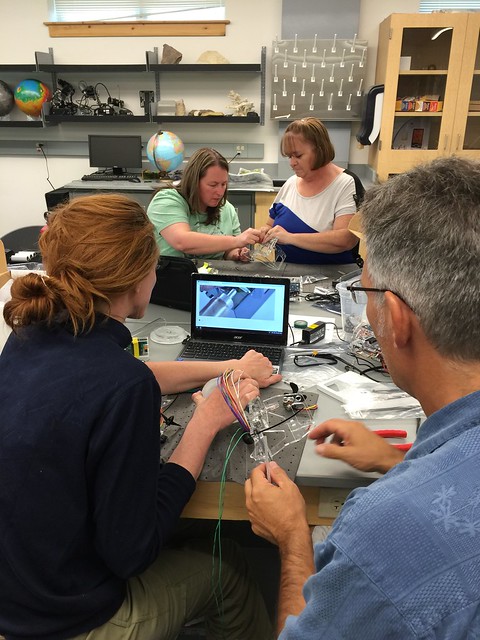
First steps involved acrylic welding the parts of the housing making sure everything was lined up and turned the correct way before making the weld … a bit nerve wracking.
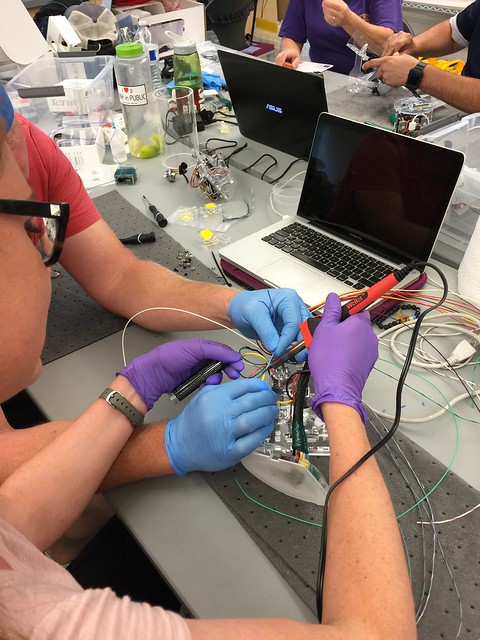
After much of the welding and gluing was done and parts started to take shape it was time to begin wiring and installing circuit boards and other electronics.
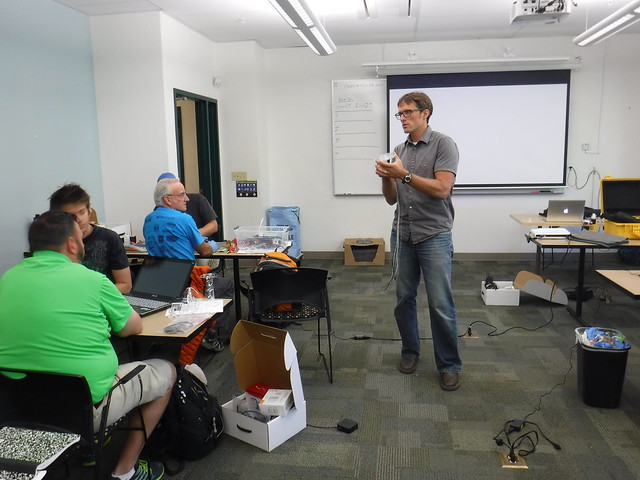
Above: Alex clarifying the next step
Above: Things taking shape while double-checking the online directions.
Below: “Shrink wrapping” soldered wiring connections with a heat gun.
Lots of gluing and wiring, but below, lots of soldering too.
This is where we left it at the end of the day Saturday. We meet next Friday and Saturday to finish building and perhaps even give them a tryout in the public swimming pool. A day at Lake Tahoe will come in October.
I recently blogged about our current course for teachers on computer programming and aerial and underwater vehicles (drones). The underwater vehicle section starts this week. In the meantime,Kirk Ellern at AboveNV, who taught the bulk of the aerial vehicle part of the class, put together this short video that illustrates what teachers learned about in his section of the class. Enjoy!
It’s been almost 2 monthssince I sharedabout how this class is going. We got started later than planned because we couldn’t get drones delivered fast enough. So far the 18 teachers have had 2 days of computer programming training with the ncLab online course (which their students have access to as well at school and home) to acquaint them with and put them at some ease as to how the course works. We originally planned 4 trainings up front but decided to wait on the last days so they can be designed to support the teachers and their students in the very kind of programming they will use with the various vehicles.
Next, we jumped into 24 hours spread over a week of training with aerial drones. We started with safety, ethical use and the laws governing drone use. Then everybody got a Parrot Rolling Spider mini-drone. We ran into some issues with getting the firmware updated. We are using 3 different drone apps for the Spiders – Free Flight3, Tynker and Tickle. They required updating the firmware before the apps would cooperate with the Spiders, but that was problematic … even though I had done a couple the day before to be sure we wouldn’t have trouble … we did. Computers wouldn’t “see” the connected Spider and the bluetooth connection you can use with Free Flight 3 tended to time out before it was successful. But we eventually figured out a method that worked and plugged them in to charge.
Teachers then practiced programming their Spiders and ended that day in groups of 3-4 planning how they would use them in class with their students. The following day each group shared out lesson ideas and even some early experiences with just their one Spider in class (we have almost 50 of them that can be checked-out for classroom use in sets of 8 – 12).
Teachers were given initial instruction and some practice in DroneBlocks as one way they and their students can program their Phantoms. Just this past Saturday we all met to fly some of the 19 Phantom 3 Professional drones the grant provided. Thursday night teachers took turns flying the Phantoms virtually using Real Flight 7.5 and the built in flight simulator that comes on the Phantom remote. After a follow-up “ground school” of sorts on Saturday and some demonstration flights of different kinds of drones the teachers got to fly the Phantoms.
A “Hex” drone takes flight
Today I got all the Phantoms prepared to be checked out to teachers to work with their students, but Saturday they decided everyone should check one out for a week or so to practice setting things up and gaining confidence. Tomorrow my goal is to update the firmware on the 50 additional Parrot drones and get them ready to be checked out as well.
Next week we start underwater vehicles with OpenROV 2.8‘s.
I shared on Twitter not long ago, “The good news is I got a grant! The bad news is I got a grant!” There is too much truth in that dichotomy, but in spite of all the extra work and rules and policies and bids and other “red tape” to be dealt with to purchase the supplies and organize the classes … this is an awesome opportunity for all concerned.
The grant requirements demanded a focus on middle and high school teachers and students, computer programing, and a STEM learning emphasis. You’ll note by the name of the grant (see the title of this post) that the grant department folks that helped in editing, implored me to mention as many aspects of the program as possible in the title.
The choice of underwater and aerial vehicles was an easy one … Nevada has been designated one of 5 states where regulations about drones have been eased to encourage research, testing and innovation in drone use (the fact that Nevada contains huge expanses of open land and 4 seasons of weather may have helped). In addition, with the emphasis on encouraging students to study computer programming … and the fact that these vehicles can be programmed … using drones in class to motivate students to engage in both seemed like a perfect match.
24 teachers, 2 middle school and 2 high school teachers from each of the 6 school districts I serve will be chosen to participate. We will start by doing 2 days of computer programming and 3D modeling utilizing the ncLab online course guided by its developers (a local startup company). Just enough to get teachers started in programming, but also to acquaint them with the online course since it will be available for them and all their students for the next year. I felt that if teachers had even some experience with programming and the online course they would be more likely to use it with their students. Students will have access to the course at school, but also at home or anywhere they can get online, so they can go as far as they like.
Each teacher will receive a Parrot Minidrone Rolling Spider – the kind you control with your phone or pad device, and a waterproof (to 10 meters) and drop proof (from 1.5 meters) digital camera to archive their learning in the institute and student learning in their classrooms.
Next, teachers will spend 3 days learning about aerial vehicles from Kirk Ellern (a former high school physics teacher) at AboveNV – a local startup. They’ll fly their “Parrots” and learn how to program them (after the institute they’ll have 4 sets of 10 Parrots they can check out for use in their classrooms). After that introduction to aerial vehicles we’ll move on to Phantom 3 Advanced drones. Here we will put the programming we learned (and note what we want to learn more about) in the ncLab course to work. Four sets of three Phantom 3 drones will be available for checkout by participating teachers for use in their classrooms.
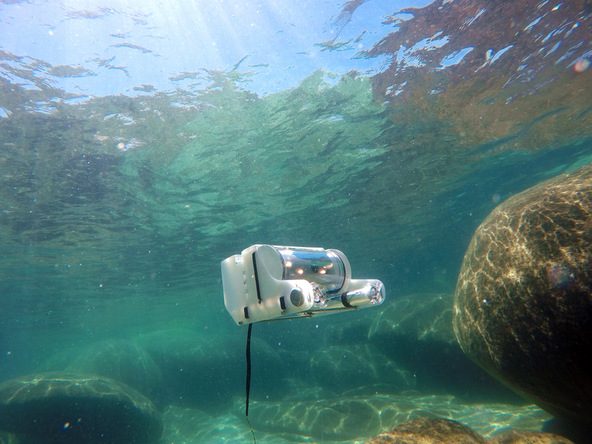
The next 5 days of class will be spent partially assembling and utilizing OpenROV 2.8 underwater vehicles. “Maker skills” will be emphasized as teachers will be taught soldering, wiring, gluing and more to prepare the vehicles for use. 6 OpenROV 2.8’s will be available for checkout by participating teachers. The 2.8’s are operated using a laptop and tether and are capable of depths up to 100 meters. They come with a camera – video/photos and sound can be recorded on the connected laptop … there’s even room for small payloads for doing research – another opportunity to use those computer programming skills as well. Alex Forrest from the Tahoe Environmental Research Center and the University of California, Davis, will lead this portion of the class. Alex has done research in Lake Tahoe utilizing those big “torpedo sized” vehicles you’ve probably seen on the news. He is just back from 3 years in Tasmania.
OpenROV 2.8 Underwater Vehicles
Throughout the school year the course instructors, all specialists in their fields, will be available to consult teachers, visit classrooms and provide follow-up instruction – to me this is a key component of the grant.
Field trip buses will be paid for so participating teachers can take their classes to a water source (lake, pond, wetland, river/stream pool) to operate and do research with the OpenROV’s.
The institute should start up in August and the initial classes will be done by October. I’ll post updates here. I’ll also set up YouTube/Flickr/Wiki and other accounts to archive our progress.
















![DSCF0003[1]](https://c3.staticflickr.com/8/7469/29103462882_bca8f00f99_z.jpg)
![DSCF0023[1]](https://c2.staticflickr.com/9/8016/29132778921_9276484789_z.jpg)